Какие есть системы координат. Декартовы прямоугольные системы координат. Связь плоской прямоугольной и полярной систем координат
Каждый современный человек обязан знать, что такое система координат. Ежедневно мы сталкиваемся с такими системами, даже не задумываясь, что они собой представляют. Когда-то в школе мы учили базовые понятия, примерно знаем что есть ось иксов, ось игреков и точка отсчета, равная нулю. На самом деле все гораздо сложнее, существует несколько разновидностей систем координат. В статье подробно рассмотрим каждую из них, а также дадим подробное описание, где и зачем они используются.
Определение и область применения
Система координат - это комплекс определений, который задает положение тела или точки с помощью чисел или же других символов. Совокупность чисел, которые определяют расположение конкретной точки, называют координатами этой точки. Системы координат используются во многих областях науки, например, в математике координаты являются совокупностью чисел, которые сопоставлены точкам в некоторой карте заранее определенного атласа. В геометрии координаты - это величины, которые определяют расположение точки в пространстве и на плоскости. В географии координаты обозначают широту, долготу и высоту над общим уровнем моря, океана или другой заранее известной величины. В астрономии координаты являются величинами, которые дают возможность определить положение звезды, например, склонение и прямое восхождение. Это далеко не полный перечень того, где используются системы координат. Если вы думаете, что эти понятия далеки от людей, не интересующихся наукой, то поверьте, что в быту они встречаются гораздо чаще, чем вы себе думаете. Возьмите хотя бы карту города, чем вам не система координат?
Разобравшись с определением, давайте рассмотрим, какие разновидности координатных систем существуют и что они из себя представляют.
Зональная система координат
Данную систему координат применяют в основном при различных горизонтальных съемках и составлении достоверных планов местности. В ее основу положена равноугольная поперечно-цилиндрическая проекция Гаусса. В этой проекции всю поверхность земного геоида делят меридианами на 6-ти градусные зоны и номеруют с 1-й по 60-ю на восток от Гринвичского меридиана. При этом средний меридиан данной 6-ти угольной зоны называют осевым. Его принято совмещать с внутренней поверхностью цилиндра и считать осью абсцисс. Для того, чтобы избежать отрицательных значений ординат (у), ординату на осевом меридиане (начальную точку отсчета) принимают не за нуль, а за 500 км, то есть перемещают на 500 км к западу. Перед ординатой обязательно указывают номер зоны.
Система координат Гаусса-Крюгера
Данная система координат берет в основу проекцию, которую предложил известный немецкий ученый Гаусс, и разработал для пользования в геодезии Крюгер. Сущность данной проекции состоит в том, что земную сферу условно делят меридианами на шестиградусные зоны. Зоны нумеруют от Гринвичского меридиана с запада на восток. Зная номер зоны, вы легко сможете определить средний меридиан, называемый осевым, по формуле Z = 60(n) – 3, где (n) – это номер зоны. Для каждой зоны делают плоское изображение, путем ее проектирования на боковую поверхность цилиндра, ось которого находится перпендикулярно к земной оси. Затем этот цилиндр пошагово развертывают на плоскость. Экватор и осевой меридиан изображают прямыми линиями. Осью абсцисс в каждой зоне является осевой меридиан, а экватор выполняет роль оси ординат. Начальной точкой отсчета служит точка пересечения экватора и осевого меридиана. Абсциссы отсчитывают к северу от экватора только со знаком плюс и к югу от экватора только со знаком минус.
Полярная система координат на плоскости
Это двумерная система координат, каждая точка в которой определяется на плоскости двумя числами - полярным радиусом и полярным углом. Полярная система координат полезна в тех случаях, когда взаимосвязь между точками проще представить в виде углов и радиусов. Полярную систему координат задают лучом, называющимся полярной или нулевой осью. Точка, из которой выходит данный луч, называют полюсом или началом координат. Произвольная точка на плоскости определяется лишь двумя полярными координатами: угловой и радиальной. Радиальная координата равняется расстоянию от точки до начала системы координат. Угловая координата равна углу, на который необходимо против часовой стрелки повернуть полярную ось, чтобы попасть в точку.
Прямоугольная система координат
Что такое прямоугольная система координат вам наверняка известно еще со школьной скамьи, но все же, давайте вспомним еще разок. Прямоугольная система координат – это такая прямолинейная система, в которой оси расположены в пространстве или на плоскости и взаимно перпендикулярны между собой. Это самая простая и часто используемая система координат. Она прямо и довольно легко обобщается для пространств с любой размерностью, что также способствует ее широчайшему применению. Положение точки на плоскости определяют двумя координатами - икс и игрек, соответственно имеется ось абсцисс и ординат.
Декартовая система координат
Поясняя, что такое декартова система координат, в первую очередь необходимо сказать, что это частный случай прямоугольной системы координат, в котором по осям установлены одинаковые масштабы. В математике чаще всего рассматривают двухмерную или трехмерную декартовую систему координат. Координаты обозначают латинскими буквами x, y, z и называют, абсциссой, ординатой и аппликатой соответственно. Координатную ось (OX) обычно называют осью абсцисс, ось (OY) – осью ординат, а ось (OZ) – осью аппликат.
Теперь вы знаете, что такое система координат, какими они бывают и где используются.
Глава I. Аналитический обзор действующих систем координат
Общие сведения о системах координат
Система координат - комплекс определений, реализующий метод координат, то есть способ определять положение точки или тела с помощью чисел или других символов. Совокупность чисел, определяющих положение конкретной точки, называется координатами этой точки. В общем и целом систему координат можно определить как опорную систему для определения положения точек в пространстве или на плоскостях и поверхностях относительно выбранных осей, плоскостей или поверхностей.
Систему координат широко применяют во многих отраслях науки.
В математике координаты - это совокупность чисел, сопоставленных точками многообразия в некоторой карте определённого атласа.
В элементарной геометрии координаты - величины, определяющие положение точки на плоскости и в пространстве. На плоскости положение точки чаще всего определяется расстояниями от двух прямых (координатных осей), пересекающихся в одной точке (начале координат) под прямым углом; одна из координат называется ординатой, а другая - абсциссой. В пространстве по системе Декарта положение точки определяется расстояниями от трёх плоскостей координат, пересекающихся в одной точке под прямыми углами друг к другу, или сферическими координатами, где начало координат находится в центре сферы.
В географии координаты выбираются как (приближённо) сферическая система координат - широта, долгота и высота над известным общим уровнем (например, океана).
В астрономии небесные координаты - упорядоченная пара угловых величин (например, прямое восхождение и склонение), с помощью которых определяют положение светил и вспомогательных точек на небесной сфере. В астрономии употребляют различные системы небесных координат. Каждая из них по существу представляет собой сферическую систему координат (без радиальной координаты) с соответствующим образом выбранной фундаментальной плоскостью и началом отсчёта. В зависимости от выбора фундаментальной плоскости система небесных координат называется горизонтальной (плоскость горизонта), экваториальной (плоскость экватора), эклиптической (плоскость эклиптики) или галактической
(галактическая плоскость).
Наиболее используемая система координат - прямоугольная система координат (также известная как декартова система координат).
Координаты на плоскости и в пространстве можно вводить бесконечным числом разных способов. Решая ту или иную математическую или физическую задачу методом координат, можно использовать различные координатные системы, выбирая ту из них, в которой задача решается проще или удобнее в данном конкретном случае. Известным обобщением системы координат являются системы отсчёта и системы референции.
Классификация систем координат
Так как мы уже выяснили, существует множество систем координат, следовательно, их нужно каким то образом классифицировать.
Классифицировать системы координат можно по:
1. прямоугольная (плоская) система координат: XY(рис. 1)
За основную плоскость XOY в данном случае принята плоскость земного экватора. Основная координатная ось OX направлена в определенную точку. Ось OY расположена в плоскости земного экватора под углом 90º к востоку от принятого начального меридиана. Ось OZ совмещена с северным направлением оси вращения Земли.
Прямоугольная СК (рис. 1)
2. Пространственная прямоугольная система координат: XYZ (рис. 2)
Начало пространственных прямоугольных координат либо определяется под условием совмещения с центром масс Земли (в общеземных системах), либо находится вблизи от него.
Ориентировка оси Z в каждой системе координат выполняется с учетом ориентировки средней оси вращения Земли. При установлении системы среднего полюса, в том числе и полюса в Системе МУН, не накладывают условия прохождения средней оси вращения через центр масс Земли, поэтому и в референцных и в общеземных системах оси Z не совпадают со средней осью вращения, а параллельны ей.
Плоскость XOY перпендикулярна оси Z и средней оси вращения Земли. Плоскость XOZ выбирается под условием ее параллельности плоскости начального астрономического меридиана.

Пространственная прямоугольная СК (рис. 2)
3. Геодезическая (эллипсоидальная) система координат: BLH (рис.3)
B– геодезическая широта, угол между нормалью к эллипсоиду, проведенной через заданную точку M на поверхности Земли, и плоскостью экватора;
L – геодезическая долгота, двугранный угол между плоскостями гринвичского G и заданного геодезического меридианов;
H – геодезическая высота над референц-эллипсоидом, расстояние по нормали от поверхности эллипсоида до точки M.

Геодезическая СК (рис. 3)
· Назначению
1. Общеземные (мировые) WGS 84, ПЗ 9011, ITRS
Общеземными принято называть такие системы координат, которые получены под условием совмещения их начала с центром масс Земли. Они устанавливаются в отношении территории, покрывающей весь земной эллипсоид. И используется для решения общеземных задач. Наиболее удобными являются географические координаты (широта и долгота) отсчитываемые от поверхности экватора и начального меридиана в виде дуг, которым соответствуют центральные углы.
2. Государственные (СК-95, СК-63, ГСК-2011)
Эта система координат ограничивается территорией одного государства и используется, для осуществления геодезических и картографических работ внутри этого государства. В РФ в качестве координатной поверхности в этой системе используется поверхность эллипсоида Красовского.
3. Местные (МСК-50, МСК-50.2, Московская)
Под местной системой координат понимается условная система координат, устанавливаемая в отношении ограниченной территории, не превышающей территорию субъекта Российской Федерации, начало отсчета координат и ориентировка осей координат которой смещены по отношению к началу отсчета координат и ориентировке осей координат единой государственной системы координат, используемой при осуществлении геодезических и картографических работ. Местные системы координат устанавливаются для проведения геодезических и топографических работ при инженерных изысканиях, строительстве и эксплуатации зданий и сооружений, межевании земель, ведении кадастров и осуществлении иных специальных работ. Обязательным требованием при установлении местных систем координат является обеспечение возможности перехода от местной системы координат к государственной системе координат, который осуществляется с использованием параметров перехода (ключей). Каждая местная система координат может создаваться с одной или несколькими трех или шести градусными зонами. Параметры местных систем координат и ключи перехода к государственной системе координат (формулы и правила, по которым координаты точек в одной системе можно получить в другой системы) устанавливает Росреестр по согласованию с Минобороны РФ.
· Началу отсчета:
1. Геоцентрические X, Y, Z, с началом отсчета в центре масс Земли;
2. Референцные (квазигеоцентрические) X, Y, Z, с началом вблизи центра масс Земли, в центре принятого референц-эллипсоида;
3. Топоцентрические X, Y, Z, с началом отсчета на поверхности Земли в точке наблюдения.
· Основной координатной плоскости XOY
Различаются по выбору основной координатной плоскости
1. Экваториальные – в плоскости экватора на определенную эпоху;
Различают первую и вторую экваториальные системы координат. Первая является вращающейся, т. е. участвует в суточном вращении Земли, вторая – неподвижная, т. е. не участвует в суточном вращении Земли.
2. Горизонтальные – в плоскости местного горизонта;
3. Орбитальные – в плоскости орбиты.
· Направление ориентировки осей координат относительно точек пространства СК делятся на
1. Звездные, если они ориентированы по далеким звездам
2. Квазарные, если оси ориентированы по далеким естественным
радиоисточникам (квазарам);
3. Земные, если оси ориентированы по неподвижным точкам земной
· Время, к которому относится положение точки весеннего равноденствия γ и направление оси z:
1. Средние, принятые на определенную эпоху (например на эпоху 2000 года);
2. Истинные, отнесенные к истинной точке весеннего равноденствия;
3. Мгновенные, соответствующие положению оси вращения на момент наблюдения.
Определение положения точки в пространстве
Итак, положение какой-либо точки в пространстве может быть определено только по отношению к каким-либо другим точкам. Та точка, относительно которой рассматривается положение других точек, называется точкой отсчете . Мы так же применим и другое наименование точки отсчета – точка наблюдения . Обычно с точкой отсчета (или с точкой наблюдения) связывают какую-либо систему координат , которую и называют системой отсчета. В выбранной системе отсчета положение КАЖДОЙ точки определяется ТРЕМЯ координатами.
Правая декартова (или прямоугольная) система координат
Эта система координат представляет собой три взаимно перпендикулярных направленных прямых, называемых так же осями координат , пересекающихся в одной точке (начале координат). Точка начала координат обычно обозначается буквой О.
Оси координат носят названия:
1. Ось абсцисс – обозначается как OX;
2. Ось ординат – обозначается как OY;
3. Ось аппликат – обозначается как OZ
Теперь объясним, почему эта система координат называется правой. Давайте посмотрим на плоскость XOY с положительного направления оси OZ, например из точки А, как это показано на рисунке.
Предположим, что мы начинаем поворачивать ось OX вокруг точки О. Так вот – правая система координат имеет такое свойство, что, если смотреть на плоскость XOY из какой-либо точки положительной полуоси OZ (у нас – это точка А), то, при повороте оси OX на 90 против часовой стрелки, её положительное направление совпадет с положительным направлением оси OY.
Такое решение было принято в научном мире, нам же остается принимать это так, как оно есть.
Итак, после того, как мы определились с системой отсчета (в нашем случае – правой декартовой системой координат), положение любой точки описывается через значения её координат или другими словами – через величины проекций этой точки на оси координат.
Записывается это так: A(x, y, z), где x, y, z – и есть координаты точки А.
Прямоугольную систему координат можно представить себе, как линии пересечения трех взаимно перпендикулярных плоскостей.
Следует заметить, что ориентировать прямоугольную систему координат в пространстве можно как угодно, при этом надо выполнить только одно условие – начало координат должно совпадать с центром отсчета (или точкой наблюдения).
Сферическая система координат
Положение точки в пространстве можно описать и другим способом. Предположим, что мы выбрали область пространства, в котором располагается точка отсчета О (или точка наблюдения), и еще нам известно расстояние от точки отсчета до некоторой точки А. Соединим эти две точки прямой ОА. Эта прямая называется радиус-вектором и обозначается, как r . Все точки, имеющие одно и тоже значение радиус-вектора, лежат на сфере, центр которой находится в точке отсчета (или точке наблюдения), а радиус этой сферы равен, соответственно радиус-вектору.
Таким образом, нам становится очевидным, что знание величины радиус-вектора не дает нам однозначного ответа о положении интересующей нас точки. Нужны еще ДВЕ координаты, ведь для однозначного определения местоположения точки количество координат должно равняться ТРЕМ.
Далее мы поступим следующим образом – построим две взаимно перпендикулярные плоскости, которые, естественно, дадут линию пересечения, и эта линия будет бесконечной, потому как и сами плоскости ничем не ограничены. Зададим на этой линии точку и обозначим ее, ну например, как точка О1. А теперь совместим эту точку О1 с центром сферы – точкой О и посмотрим, что получается?
А получается очень интересная картина:
· Как одна, так и другая плоскости будут центральными плоскостями.
· Пересечение этих плоскостей с поверхностью сферы обозначат большие круги
· Один из этих кругов – произвольно, мы назовем ЭКВАТОРОМ , тогда другой круг будет называться ГЛАВНЫМ МЕРИДИАНОМ.
· Линия пересечения двух плоскостей однозначно определит направление ЛИНИИ ГЛАВНОГО МЕРИДИАНА.
Точки пересечения линии главного меридиана с поверхностью сферы обозначим, как М1 и М2
Через центр сферы точку О в плоскости главного меридиана проведем прямую, перпендикулярную линии главного меридиана. Эта прямая носит название ПОЛЯРНАЯ ОСЬ .
Полярная ось пересечет поверхность сферы в двух точках, которые называются ПОЛЮСАМИ СФЕРЫ. Обозначим эти точки, как Р1 и Р2.
Определение координат точки в пространстве
Теперь рассмотрим процесс определения координат точки в пространстве, а так же дадим наименования этим координатам. Для полноты картины, при определении положения точки, укажем основные направления, от которых производится отсчет координат, а так же положительное направление при отсчете.
1. Задаем положение в пространстве точки отсчета (или точки наблюдения). Обозначим эту точку буквой О.
2. Строим сферу, радиус которой равен длине радиус-вектора точки А. (Радиус-вектор точки А – это расстояние между точками О и А). Центр сферы располагается в точке отсчета О.
3. Задаем положение в пространстве плоскости ЭКВАТОРА, а соответственно плоскости ГЛАВНОГО МЕРИДИАНА. Следует напомнить, что эти плоскости взаимно перпендикулярны и являются центральными.
4. Пересечение этих плоскостей с поверхностью сферы определяет нам положение круга экватора, круга главного меридиана, а так же направление линии главного меридиана и полярной оси.
5. Определяем положение полюсов полярной оси и полюсов линии главного меридиана. (Полюса полярной оси – точки пересечение полярной оси с поверхностью сферы. Полюса линии главного меридиана – это точки пересечения линии главного меридиана с поверхностью сферы).
6. Через точку А и полярную ось строим плоскость, которую назовем плоскостью меридиана точки А. При пересечении этой плоскости с поверхностью сферы получится большой круг, который мы назовем МЕРИДИАНОМ точки А.
7. Меридиан точки А пересечет круг ЭКВАТОРА в некоторой точке, которую мы обозначим, как Е1
8. Положение точки Е1 на экваториальном круге определяется длиной дуги, заключенной между точками М1 и Е1. Отсчет ведется ПРОТИВ часовой стрелки. Дуга экваториального круга, заключенная между точками М1 и Е1 называется ДОЛГОТОЙ точки А. Долгота обозначается буквой .
Подведем промежуточный итог. На данный момент нам известны ДВЕ из ТРЕХ координат, описывающих положение точки А в пространстве – это радиус-вектор (r) и долгота (). Теперь мы будем определять третью координату. Эта координата определяется положением точки А на ее меридиане. Но вот положение начальной точки, от которой происходит отсчет, однозначно не определено: мы можем начинать отсчет как от полюса сферы (точка Р1), так и от точки Е1, то есть от точки пересечения линий меридиана точки А и экватора (или другими словами – от линии экватора).
В первом случае, положение точки А на меридиане называется ПОЛЯРНЫМ РАССТОЯНИЕМ (обозначается как р ) и определяется длиной дуги, заключенной между точкой Р1 (или точкой полюса сферы) и точкой А. Отсчет ведется вдоль линии меридиана от точки Р1 к точке А.
Во втором случае, когда отсчет ведется от линии экватора, положение точки А на линии меридиана называется ШИРОТОЙ (обозначается как и определяется длиной дуги, заключенной между точкой Е1 и точкой А.
Теперь мы можем окончательно сказать, что положение точки А в сферической системе координат определяется через:
· длину радиуса сферы (r),
· длину дуги долготы (),
· длину дуги полярного расстояния (р)
В этом случае координаты точки А запишутся следующим образом: А(r, , p)
Если пользоваться иной системой отсчета, то положение точки А в сферической системе координат определяется через:
· длину радиуса сферы (r),
· длину дуги долготы (),
· длину дуги широты ()
В этом случае координаты точки А запишутся следующим образом: А(r, , )
Способы измерения дуг
Возникает вопрос – как же нам измерить эти дуги? Самый простой и естественный способ – это провести непосредственное измерение длин дуг гибкой линейкой, и это возможно, если размеры сферы сравнимы с размерами человека. Но как поступить, если это условие не выполнимо?
В этом случае мы прибегнем к измерению ОТНОСИТЕЛЬНОЙ длины дуги. За эталон же мы примем длину окружности, частью которой является интересующая нас дуга. Как это можно сделать?
Если вы находитесь в некоторой нулевой точке и размышляете над тем, сколько единиц расстояния нужно пройти строго вперёд, а затем - строго вправо, чтобы оказаться в некоторой другой точке, то вы уже пользуетесь прямоугольной декартовой системой координат на плоскости. А если точка находится выше плоскости, на которой вы стоите, и к вашим расчётам добавляется подъём к точке по лестнице строго вверх также на определённое число единиц расстояния, то вы уже пользуетесь прямоугольной декартовой системой координат в пространстве.
Упорядоченная система двух или трёх пересекающихся перпендикулярных друг другу осей с общим началом отсчёта (началом координат) и общей единицей длины называется прямоугольной декартовой системой координат .
С именем французского математика Рене Декарта (1596-1662) связывают прежде всего такую систему координат, в которой на всех осях отсчитывается общая единица длины и оси являются прямыми. Помимо прямоугольной существует общая декартова система координат (аффинная система координат ). Она может включать и не обязательно перпендикулярные оси. Если же оси перпендикулярны, то система координат является прямоугольной.
Прямоугольная декартова система координат на плоскости имеет две оси, а прямоугольная декартова система координат в пространстве - три оси. Каждая точка на плоскости или в пространстве определяется упорядоченным набором координат - чисел в соответствии единице длины системы координат.
Заметим, что, как следует из определения, существует декартова система координат и на прямой, то есть в одном измерении. Введение декартовых координат на прямой представляет собой один из способов, с помощью которого любой точке прямой ставится в соответствие вполне определённое вещественное число, то есть координата.
Метод координат, возникший в работах Рене Декарта, ознаменовал собой революционную перестройку всей математики. Появилась возможность истолковывать алгебраические уравнения (или неравенства) в виде геометрических образов (графиков) и, наоборот, искать решение геометрических задач с помощью аналитических формул, систем уравнений. Так, неравенство z < 3 геометрически означает полупространство, лежащее ниже плоскости, параллельной координатной плоскости xOy и находящейся выше этой плоскости на 3 единицы.
С помощью декартовой системы координат принадлежность точки заданной кривой соответствует тому, что числа x и y удовлетворяют некоторому уравнению. Так, координаты точки окружности с центром в заданной точке (a ; b ) удовлетворяют уравнению (x - a )² + (y - b )² = R ² .
Прямоугольная декартова система координат на плоскости
Две перпендикулярные оси на плоскости с общим началом и одинаковой масштабной единицей образуют декартову прямоугольную систему координат на плоскости . Одна из этих осей называется осью Ox , или осью абсцисс , другую - осью Oy , или осью ординат . Эти оси называются также координатными осями. Обозначим через M x и M y соответственно проекции произвольной точки М на оси Ox и Oy . Как получить проекции? Проведём через точку М Ox . Эта прямая пересекает ось Ox в точке M x . Проведём через точку М прямую, перпендикулярную оси Oy . Эта прямая пересекает ось Oy в точке M y . Это показано на рисунке ниже.
x и y точки М будем называть соответственно величины направленных отрезков OM x и OM y . Величины этих направленных отрезков рассчитываются соответственно как x = x 0 - 0 и y = y 0 - 0 . Декартовы координаты x и y точки М абсциссой и ординатой . Тот факт, что точка М имеет координаты x и y , обозначается так: M (x , y ) .
Координатные оси разбивают плоскость на четыре квадранта , нумерация которых показана на рисунке ниже. На нём же указана расстановка знаков координат точек в зависимости от их расположения в том или ином квадранте.
Помимо декартовых прямоугольных координат на плоскости часто рассматривается также полярная система координат. О способе перехода от одной системы координат к другой - в уроке полярная система координат .

Прямоугольная декартова система координат в пространстве
Декартовы координаты в пространстве вводятся в полной аналогии с декартовыми координатами на плоскости.
Три взаимно перпендикулярные оси в пространстве (координатные оси) с общим началом O и одинаковой масштабной единицей образуют декартову прямоугольную систему координат в пространстве .
Одну из указанных осей называют осью Ox , или осью абсцисс , другую - осью Oy , или осью ординат , третью - осью Oz , или осью аппликат . Пусть M x , M y M z - проекции произвольной точки М пространства на оси Ox , Oy и Oz соответственно.
Проведём через точку М Ox Ox в точке M x . Проведём через точку М плоскость, перпендикулярную оси Oy . Эта плоскость пересекает ось Oy в точке M y . Проведём через точку М плоскость, перпендикулярную оси Oz . Эта плоскость пересекает ось Oz в точке M z .
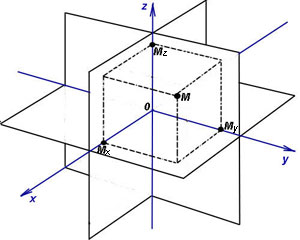
Декартовыми прямоугольными координатами x , y и z точки М будем называть соответственно величины направленных отрезков OM x , OM y и OM z . Величины этих направленных отрезков рассчитываются соответственно как x = x 0 - 0 , y = y 0 - 0 и z = z 0 - 0 .
Декартовы координаты x , y и z точки М называются соответственно её абсциссой , ординатой и аппликатой .
Попарно взятые координатные оси располагаются в координатных плоскостях xOy , yOz и zOx .
Задачи о точках в декартовой системе координат
Пример 1.
A (2; -3) ;
B (3; -1) ;
C (-5; 1) .
Найти координаты проекций этих точек на ось абсцисс.
Решение. Как следует из теоретической части этого урока, проекция точки на ось абсцисс расположена на самой оси абсцисс, то есть оси Ox , а следовательно имеет абсциссу, равную абсциссе самой точки, и ординату (координату на оси Oy , которую ось абсцисс пересекает в точке 0), равную нулю. Итак получаем следующие координаты данных точек на ось абсцисс:
A x (2; 0) ;
B x (3; 0) ;
C x (-5; 0) .
Пример 2. В декартовой системе координат на плоскости даны точки
A (-3; 2) ;
B (-5; 1) ;
C (3; -2) .
Найти координаты проекций этих точек на ось ординат.
Решение. Как следует из теоретической части этого урока, проекция точки на ось ординат расположена на самой оси ординат, то есть оси Oy , а следовательно имеет ординату, равную ординате самой точки, и абсциссу (координату на оси Ox , которую ось ординат пересекает в точке 0), равную нулю. Итак получаем следующие координаты данных точек на ось ординат:
A y (0; 2) ;
B y (0; 1) ;
C y (0; -2) .
Пример 3. В декартовой системе координат на плоскости даны точки
A (2; 3) ;
B (-3; 2) ;
C (-1; -1) .
Ox .
Ox Ox Ox , будет иметь такую же абсциссу, что и данная точка, и ординату, равную по абсолютной величине ординате данной точки, и противоположную ей по знаку. Итак получаем следующие координаты точек, симметричных этим точкам относительно оси Ox :
A" (2; -3) ;
B" (-3; -2) ;
C" (-1; 1) .
Пример 4. Определить, в каких квадрантах (четвертях, рисунок с квадрантами - в конце параграфа "Прямоугольная декартова система координат на плоскости") может быть расположена точка M (x ; y ) , если
1) xy > 0 ;
2) xy < 0 ;
3) x − y = 0 ;
4) x + y = 0 ;
5) x + y > 0 ;
6) x + y < 0 ;
7) x − y > 0 ;
8) x − y < 0 .
Пример 5. В декартовой системе координат на плоскости даны точки
A (-2; 5) ;
B (3; -5) ;
C (a ; b ) .
Найти координаты точек, симметричных этим точкам относительно оси Oy .
Продолжаем решать задачи вместе
Пример 6. В декартовой системе координат на плоскости даны точки
A (-1; 2) ;
B (3; -1) ;
C (-2; -2) .
Найти координаты точек, симметричных этим точкам относительно оси Oy .
Решение. Поворачиваем на 180 градусов вокруг оси Oy направленный отрезок, идущий от оси Oy до данной точки. На рисунке, где обозначены квадранты плоскости, видим, что точка, симметричная данной относительно оси Oy , будет иметь такую же ординату, что и данная точка, и абсциссу, равную по абсолютной величине абсциссе данной точки, и противоположную ей по знаку. Итак получаем следующие координаты точек, симметричных этим точкам относительно оси Oy :
A" (1; 2) ;
B" (-3; -1) ;
C" (2; -2) .
Пример 7. В декартовой системе координат на плоскости даны точки
A (3; 3) ;
B (2; -4) ;
C (-2; 1) .
Найти координаты точек, симметричных этим точкам относительно начала координат.
Решение. Поворачиваем на 180 градусов вокруг начала координат направленный отрезок, идущий от начала координат к данной точке. На рисунке, где обозначены квадранты плоскости, видим, что точка, симметричная данной относительно начала координат, будет иметь абсциссу и ординату, равные по абсолютной величине абсциссе и ординате данной точки, но противоположные им по знаку. Итак получаем следующие координаты точек, симметричных этим точкам относительно начала координат:
A" (-3; -3) ;
B" (-2; 4) ;
C (2; -1) .
Пример 8.
A (4; 3; 5) ;
B (-3; 2; 1) ;
C (2; -3; 0) .
Найти координаты проекций этих точек:
1) на плоскость Oxy ;
2) на плоскость Oxz ;
3) на плоскость Oyz ;
4) на ось абсцисс;
5) на ось ординат;
6) на ось апликат.
1) Проекция точки на плоскость Oxy расположена на самой этой плоскости, а следовательно имеет абсциссу и ординату, равные абсциссе и ординате данной точки, и апликату, равную нулю. Итак получаем следующие координаты проекций данных точек на Oxy :
A xy (4; 3; 0) ;
B xy (-3; 2; 0) ;
C xy (2; -3; 0) .
2) Проекция точки на плоскость Oxz расположена на самой этой плоскости, а следовательно имеет абсциссу и апликату, равные абсциссе и апликате данной точки, и ординату, равную нулю. Итак получаем следующие координаты проекций данных точек на Oxz :
A xz (4; 0; 5) ;
B xz (-3; 0; 1) ;
C xz (2; 0; 0) .
3) Проекция точки на плоскость Oyz расположена на самой этой плоскости, а следовательно имеет ординату и апликату, равные ординате и апликате данной точки, и абсциссу, равную нулю. Итак получаем следующие координаты проекций данных точек на Oyz :
A yz (0; 3; 5) ;
B yz (0; 2; 1) ;
C yz (0; -3; 0) .
4) Как следует из теоретической части этого урока, проекция точки на ось абсцисс расположена на самой оси абсцисс, то есть оси Ox , а следовательно имеет абсциссу, равную абсциссе самой точки, а ордината и апликата проекции равны нулю (поскольку оси ординат и апликат пересекают ось абсцисс в точке 0). Получаем следующие координаты проекций данных точек на ось абсцисс:
A x (4; 0; 0) ;
B x (-3; 0; 0) ;
C x (2; 0; 0) .
5) Проекция точки на ось ординат расположена на самой оси ординат, то есть оси Oy , а следовательно имеет ординату, равную ординате самой точки, а абсцисса и апликата проекции равны нулю (поскольку оси абсцисс и апликат пересекают ось ординат в точке 0). Получаем следующие координаты проекций данных точек на ось ординат:
A y (0; 3; 0) ;
B y (0; 2; 0) ;
C y (0; -3; 0) .
6) Проекция точки на ось апликат расположена на самой оси апликат, то есть оси Oz , а следовательно имеет апликату, равную апликате самой точки, а абсцисса и ордината проекции равны нулю (поскольку оси абсцисс и ординат пересекают ось апликат в точке 0). Получаем следующие координаты проекций данных точек на ось апликат:
A z (0; 0; 5) ;
B z (0; 0; 1) ;
C z (0; 0; 0) .
Пример 9. В декартовой системе координат в пространстве даны точки
A (2; 3; 1) ;
B (5; -3; 2) ;
C (-3; 2; -1) .
Найти координаты точек, симметричных этим точкам относительно:
1) плоскости Oxy ;
2) плоскости Oxz ;
3) плоскости Oyz ;
4) оси абсцисс;
5) оси ординат;
6) оси апликат;
7) начала координат.
1) "Продвигаем" точку по другую сторону оси Oxy Oxy , будет иметь абсциссу и ординату, равные абсциссе и ординате данной точки, и апликату, равную по величине апликате данной точки, но противоположную ей по знаку. Итак, получаем следующие координаты точек, симметричных данным относительно плоскости Oxy :
A" (2; 3; -1) ;
B" (5; -3; -2) ;
C" (-3; 2; 1) .
2) "Продвигаем" точку по другую сторону оси Oxz на то же расстояние. По рисунку, отображающему координатное пространство, видим, что точка, симметричная данной относительно оси Oxz , будет иметь абсциссу и апликату, равные абсциссе и апликате данной точки, и ординату, равную по величине ординате данной точки, но противоположную ей по знаку. Итак, получаем следующие координаты точек, симметричных данным относительно плоскости Oxz :
A" (2; -3; 1) ;
B" (5; 3; 2) ;
C" (-3; -2; -1) .
3) "Продвигаем" точку по другую сторону оси Oyz на то же расстояние. По рисунку, отображающему координатное пространство, видим, что точка, симметричная данной относительно оси Oyz , будет иметь ординату и апликату, равные ординате и апликате данной точки, и абсциссу, равную по величине абсциссе данной точки, но противоположную ей по знаку. Итак, получаем следующие координаты точек, симметричных данным относительно плоскости Oyz :
A" (-2; 3; 1) ;
B" (-5; -3; 2) ;
C" (3; 2; -1) .
По аналогии с симметричными точками на плоскости и точками пространства, симметричными данным относительно плоскостей, замечаем, что в случае симметрии относительно некоторой оси декартовой системы координат в пространстве, координата на оси, относительно которой задана симметрия, сохранит свой знак, а координаты на двух других осях будут теми же по абсолютной величине, что и координаты данной точки, но противоположными по знаку.
4) Свой знак сохранит абсцисса, а ордината и апликата поменяют знаки. Итак, получаем следующие координаты точек, симметричных данным относительно оси абсцисс:
A" (2; -3; -1) ;
B" (5; 3; -2) ;
C" (-3; -2; 1) .
5) Свой знак сохранит ордината, а абсцисса и апликата поменяют знаки. Итак, получаем следующие координаты точек, симметричных данным относительно оси ординат:
A" (-2; 3; -1) ;
B" (-5; -3; -2) ;
C" (3; 2; 1) .
6) Свой знак сохранит апликата, а абсцисса и ордината поменяют знаки. Итак, получаем следующие координаты точек, симметричных данным относительно оси апликат:
A" (-2; -3; 1) ;
B" (-5; 3; 2) ;
C" (3; -2; -1) .
7) По аналогии с симметрии в случае с точками на плоскости, в случае симметрии относительно начала координат все координаты точки, симметричной данной, будут равными по абсолютной величине координатам данной точки, но противоположными им по знаку. Итак, получаем следующие координаты точек, симметричных данным относительно начала координат.